

Robot 6 ejes TR30-1720B
Descripción
Categoría: Robot 6 ejes
Modelo: TR30-1720B
Payload: 30kg
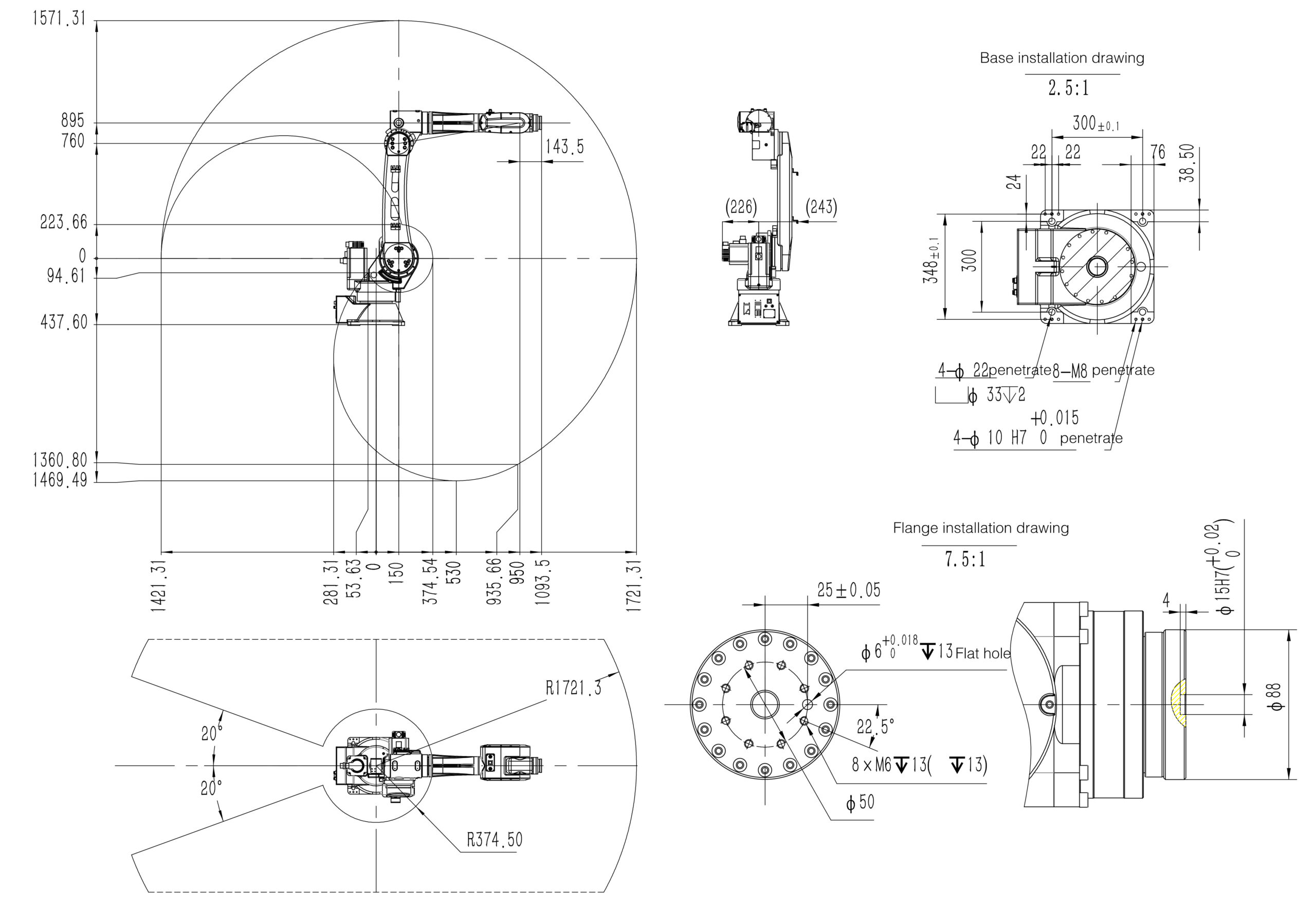
Alcance: 1721mm
Debido a mejoras y optimizaciones, las especificaciones y la apariencia pueden cambiar sin previo aviso. ¡Nos disculpamos por cualquier inconveniente causado!

Descripción técnica:
| TR30-1720B | |||
| Rated Payload | 30kg | ||
| Arm Reach | 1721mm | ||
| Position Repeatability | ±0.05mm | ||
| Protection Level | IP54/IP67(5&6 Axes Optional) | ||
| Structural Form | Vertical Multi-jointed Series Structure | ||
| DOF | 6 | ||
| Max Speed | J1 | 186°/s | |
| J2 | 170°/s | ||
| J3 | 200°/s | ||
| J4 | 452°/s | ||
| J5 | 330°/s | ||
| J6 | 450°/s | ||
| Max Operation Area | J1 | ±160° | |
| J2 | -80°~150° | ||
| J3 | -100°~80° | ||
| J4 | ±150° | ||
| J5 | ±110° | ||
| J6 | ±360° | ||
| Wrist Allowable Torque | J4 | 62Nm | |
| J5 | 62Nm | ||
| J6 | 35Nm | ||
| Maximum Allowable Inertia of the Wrist | J4 | 1.5kgm²sup2; | |
| J5 | 1.5kgm² | ||
| J6 | 0.7kgm² | ||
| Rated Power | 5kw | ||
| User Wiring | RVV10*0.2 | ||
| User Piping | 2*Φ8mm | ||
| User Distribution | three phase AC380V-10%~+10% | ||
| Applicable Environment | Temperature | 0~45°C | |
| Humidity | 10%~80%RH | ||
| Max Temperature Gradient | 1.5°C/min | ||
| Body Weight | 220kg | ||
| Control Cabinet | TRC5-B06 | ||
| Installation Method | Floor-standing | ||
Diagráma: